The Dynamixel MX-106R is one of the most powerful and versatile servos used in robotics today. Produced by Robotis, the MX-106R is widely recognized for its precision, durability, and advanced control features. It is a key component in many robotic systems, offering high torque, speed, and programmability. The servo is particularly popular in applications like humanoid robots, robotic arms, and other systems that require high-performance actuation.
This article aims to provide a comprehensive understanding of the Dynamixel MX-106R schematic, which is essential for anyone looking to integrate this servo into their projects. We will explore the servo’s technical specifications, key components, and wiring diagrams to help you better understand how it operates. Additionally, we will discuss how to interface the MX-106R with other devices, its control features, and troubleshooting tips for common issues.
What is the Dynamixel MX-106R?
The Dynamixel MX-106R is a highly advanced smart servo actuator, designed with both professional and hobbyist applications in mind. It stands out due to its ability to provide feedback on position, speed, temperature, and load, as well as its daisy-chainable communication feature. This makes it ideal for complex robotic systems that require precision and detailed control.
The MX-106R features RS-485 communication, allowing it to be connected in a daisy-chain configuration, enabling multiple servos to be controlled from a single microcontroller or PC. It also offers PID control, 360-degree rotation, and a high torque-to-size ratio. These features make it suitable for applications requiring precise movement, such as humanoid robots, robotic arms, and other complex robotic systems.
Key Features of the Dynamixel MX-106R
- Torque: The MX-106R provides a stall torque of 8.4 N·m at 14.8V, making it one of the strongest servos in the Dynamixel lineup.
- Control Modes: The actuator supports several control modes, including position control, velocity control, torque control, and extended position control, offering a wide range of options for different applications.
- Feedback: It offers real-time feedback on parameters such as position, speed, temperature, and load.
- Communication: The MX-106R uses the RS-485 half-duplex asynchronous serial communication protocol, which is reliable and allows for the connection of multiple devices on a single bus.
- Durability: With a robust metal gear design and high-quality materials, the MX-106R is built to withstand the demands of high-performance applications.
Understanding the Dynamixel MX-106R Schematic
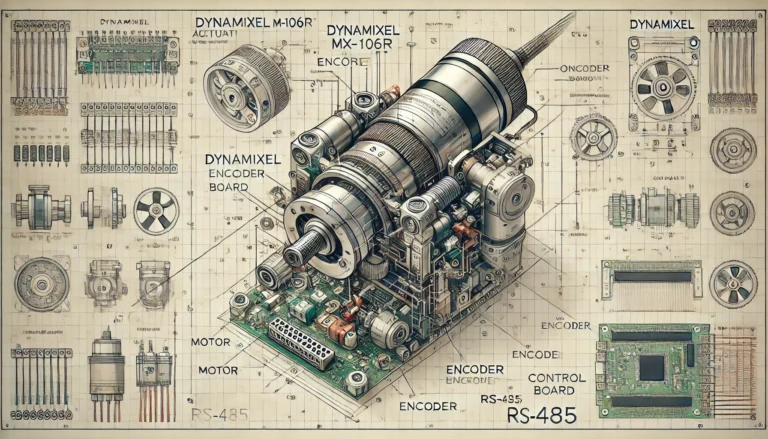
Dynamixel MX-106R Schematic. The schematic of the Dynamixel MX-106R provides a detailed view of the internal wiring and components, offering insights into how the servo functions. Understanding the schematic is crucial for anyone who wants to integrate the servo into custom applications or troubleshoot technical issues.
Core Components of the Schematic
At its core, the MX-106R schematic consists of several key components that work together to control the servo’s movement and provide feedback:
- Motor: The DC motor drives the actuator, providing the torque needed for rotation. The schematic shows how the motor is wired to the control circuitry.
- Encoder: An encoder is used to track the position of the servo’s output shaft. It provides feedback to the control system, enabling precise control of the servo’s position and speed.
- Control Board: The control board contains the microcontroller and circuitry that manage the motor’s power, interpret signals, and communicate with external devices via the RS-485 protocol.
- Power Supply: The schematic illustrates how the power is supplied to the motor and control circuits. The MX-106R operates at a voltage range of 12V to 14.8V, with protection circuits in place to prevent damage from overvoltage or undervoltage.
- Communication Circuitry: The RS-485 communication circuit is responsible for sending and receiving data from the host controller. It is a half-duplex system, meaning that it can send or receive data, but not both simultaneously.
- Temperature Sensor: The schematic also includes a temperature sensor, which monitors the internal temperature of the servo to prevent overheating. If the temperature exceeds a safe threshold, the servo will automatically reduce power or shut down to prevent damage.
Wiring Diagram and Pinout
Dynamixel MX-106R Schematic. Understanding the wiring diagram and pinout of the MX-106R is critical for integrating it into your robotic systems. The servo features several key connections:
- VCC (Power): This pin supplies the necessary voltage to power the servo.
- Ground (GND): The ground pin completes the electrical circuit and must be connected to the ground of the power supply.
- Data+ (D+), Data- (D-): These pins are used for RS-485 communication. Data+ and Data- must be connected to the corresponding pins of the microcontroller or communication device.
In addition to the basic power and communication connections, the schematic may also include connections for optional features like external sensors or additional feedback devices.
Control Modes in the Schematic
The control modes of the MX-106R are implemented through the internal circuitry and are controlled by the microcontroller. These modes include:
- Position Control Mode: In this mode, the servo moves to a specific position based on the input signal. The position is determined using the encoder, which provides feedback to ensure that the desired position is reached.
- Velocity Control Mode: This mode allows for the control of the speed of the servo’s movement. The speed can be adjusted in real-time, making it useful for applications requiring smooth and consistent motion.
- Torque Control Mode: In torque control mode, the servo adjusts its output to maintain a specific torque level. This mode is useful in applications where force, rather than position, is the primary concern.
- Extended Position Control Mode: This mode allows for continuous rotation, making the MX-106R function as a motor for applications like wheels or rotary platforms.
Dynamixel MX-106R Schematic. Each of these control modes is managed through the internal circuitry as shown in the schematic, with signals being processed by the microcontroller to adjust the motor’s power output accordingly.
Interfacing the Dynamixel MX-106R with a Microcontroller
To make the most of the Dynamixel MX-106R, it needs to be connected to a microcontroller or PC that can send commands and receive feedback via the RS-485 communication protocol. The most common controllers used with the MX-106R include Arduino, Raspberry Pi, and dedicated Dynamixel controllers like the Robotis OpenCM9.04.
Step-by-Step Guide to Interfacing the MX-106R
- Power the Servo: Connect the VCC and GND pins to a suitable power supply, ensuring that the voltage is within the 12V to 14.8V range. A power supply that can provide sufficient current (at least 5A) is recommended for driving multiple servos.
- Connect the Communication Lines: The RS-485 communication lines (Data+ and Data-) must be connected to the corresponding pins on the microcontroller. If your microcontroller does not support RS-485 natively, you can use an RS-485 to TTL converter.
- Install the Dynamixel Library: If you are using an Arduino or similar platform, you will need to install the Dynamixel SDK or compatible library, which allows you to send commands to the servo and read data from it.
- Write Control Code: Write the necessary code to send control signals to the MX-106R. For example, you can send commands to move the servo to a specific position, adjust the speed, or set the torque.
- Monitor Feedback: The MX-106R provides real-time feedback on position, speed, and load. You can use this data to adjust the servo’s operation dynamically, ensuring precise control over your robotic system.
Troubleshooting Common Issues
Dynamixel MX-106R Schematic. When working with the Dynamixel MX-106R, you may encounter certain issues that require troubleshooting. Below are some common problems and their potential solutions:
1. Servo Not Responding
- Possible Causes: Check the power supply to ensure the servo is receiving the correct voltage. Verify that the communication lines are properly connected, and check for any loose or damaged wires.
- Solution: Double-check the wiring diagram and ensure that the correct communication protocol (RS-485) is being used.
2. Overheating
- Possible Causes: Continuous operation under high load can cause the servo to overheat. The temperature sensor in the MX-106R will reduce power or shut down the servo to prevent damage.
- Solution: Reduce the load on the servo or increase ventilation. Consider adding heat sinks or cooling fans if the servo is operating in a confined space.
3. Erratic Movement
- Possible Causes: Erratic movement may result from poor communication or incorrect control signals.
- Solution: Check the control code for errors, ensure the servo is properly calibrated, and verify that the communication lines are free from interference.
4. Position Drift
- Possible Causes: Over time, mechanical wear or incorrect calibration can cause the servo’s position to drift.
- Solution: Recalibrate the servo using the Dynamixel SDK or a dedicated control tool, and check for any mechanical issues that may be affecting performance.
Conclusion
The Dynamixel MX-106R is a powerful and versatile servo actuator that offers advanced control features, making it ideal for complex robotic systems. Understanding the schematic of the MX-
106R is crucial for integrating it into your projects and troubleshooting any issues that may arise.
Dynamixel MX-106R Schematic. The servo’s ability to provide real-time feedback on position, speed, torque, and temperature, combined with its daisy-chainable communication, makes it a popular choice for applications in humanoid robots, robotic arms, and other advanced robotics projects.
By following the wiring diagrams, understanding the control modes, and properly interfacing the MX-106R with your microcontroller, you can unlock the full potential of this powerful servo.
FAQs
How do I connect the Dynamixel MX-106R to an Arduino?
To connect the MX-106R to an Arduino, you will need an RS-485 to TTL converter to handle the communication protocol. Connect the power supply (12V-14.8V) and ground, and wire the Data+ and Data- lines from the servo to the converter, which then connects to the Arduino’s serial pins.
What is the maximum torque of the Dynamixel MX-106R?
The MX-106R offers a maximum stall torque of 8.4 N·m at 14.8V, making it one of the most powerful servos in the Dynamixel series.
Can the MX-106R rotate 360 degrees?
Yes, the MX-106R supports continuous rotation in Extended Position Control Mode, which allows for full 360-degree rotation and beyond, making it ideal for wheel-based applications.
How does the MX-106R provide feedback?
The MX-106R provides real-time feedback on position, speed, load, and temperature through its internal sensors. This data is transmitted via the RS-485 communication protocol and can be read by the controller or PC. Dynamixel MX-106R Schematic
What is the operating voltage range for the MX-106R?
The recommended operating voltage for the MX-106R is between 12V and 14.8V. Using a voltage outside this range can result in poor performance or damage to the servo.
How do I troubleshoot communication errors with the MX-106R?
If you’re experiencing communication errors, first check the wiring connections to ensure they are correct and secure. Make sure the RS-485 protocol is being used and that there is no interference in the communication lines. Verify the device ID in the control code matches the servo’s ID. Dynamixel MX-106R Schematic